- Manipulator000.jpg (81.04 KiB) Viewed 36133 times
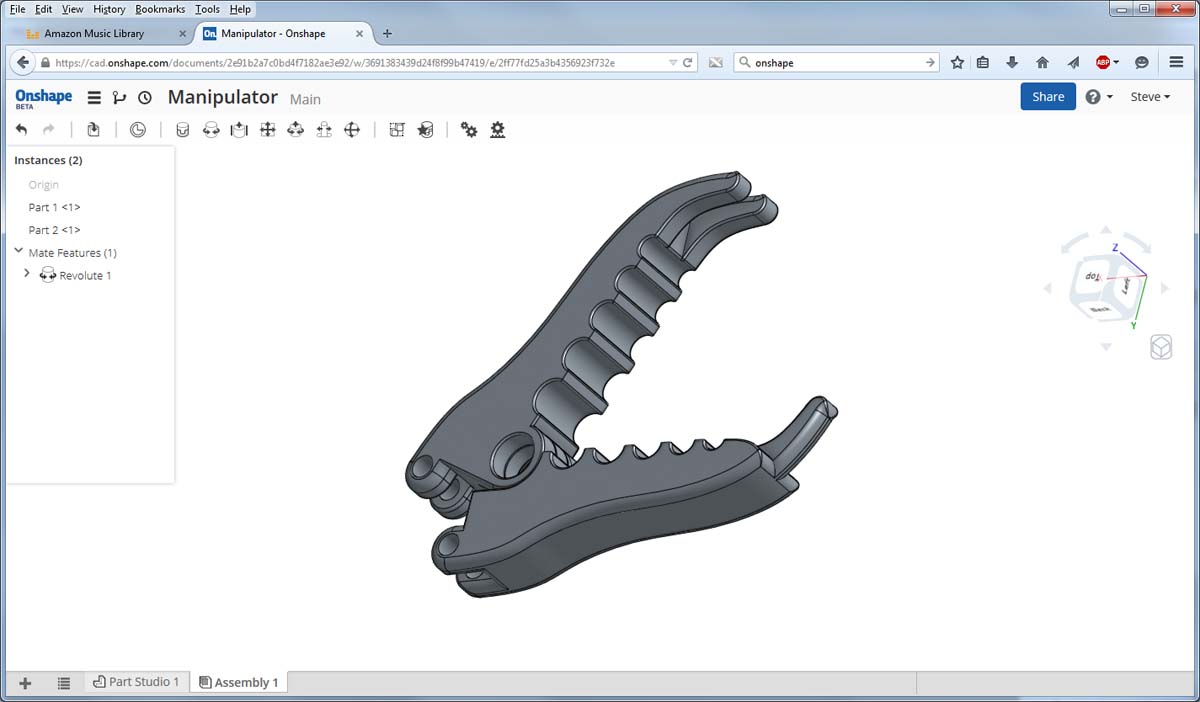
I was introduced to this new online based CAD program the other day called Onshape so I decided to design this a new Manipulator to see how well the program worked.
- Manipulator001.jpg (67.35 KiB) Viewed 36133 times
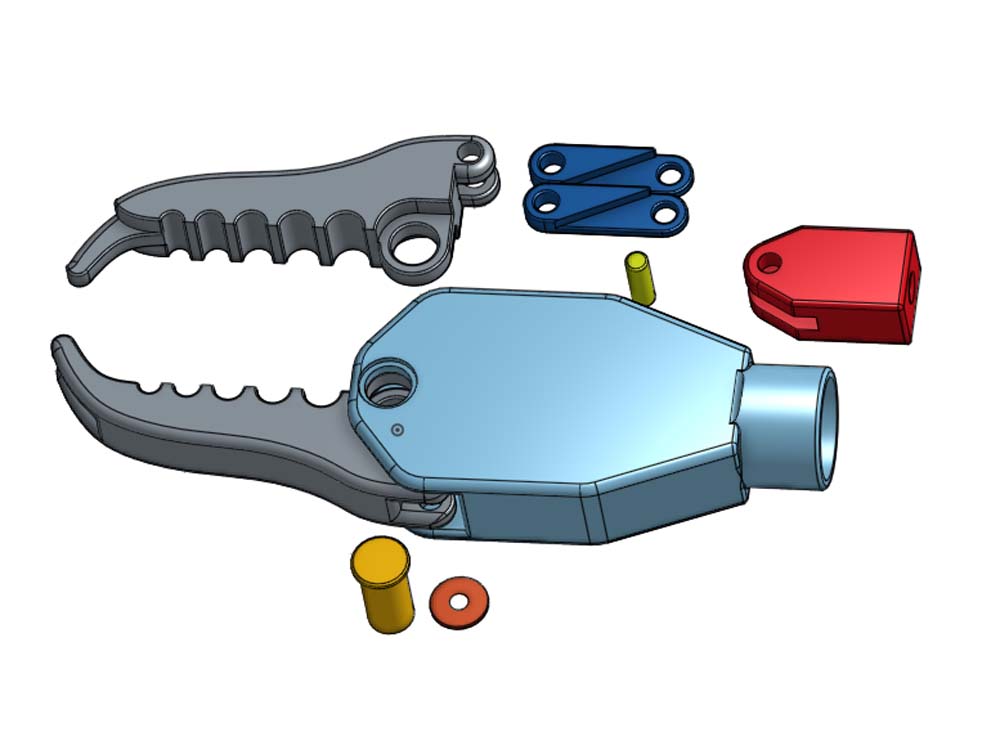
After a few hours of work these are the basics parts of the design that I cam up with. The hand and gripper finger portions of the manipulator will be 3D printed and attach to a PVC arm and motor housing much like some of the other manipulators that I've done in the past.
- Manipulator002.jpg (56.5 KiB) Viewed 36133 times
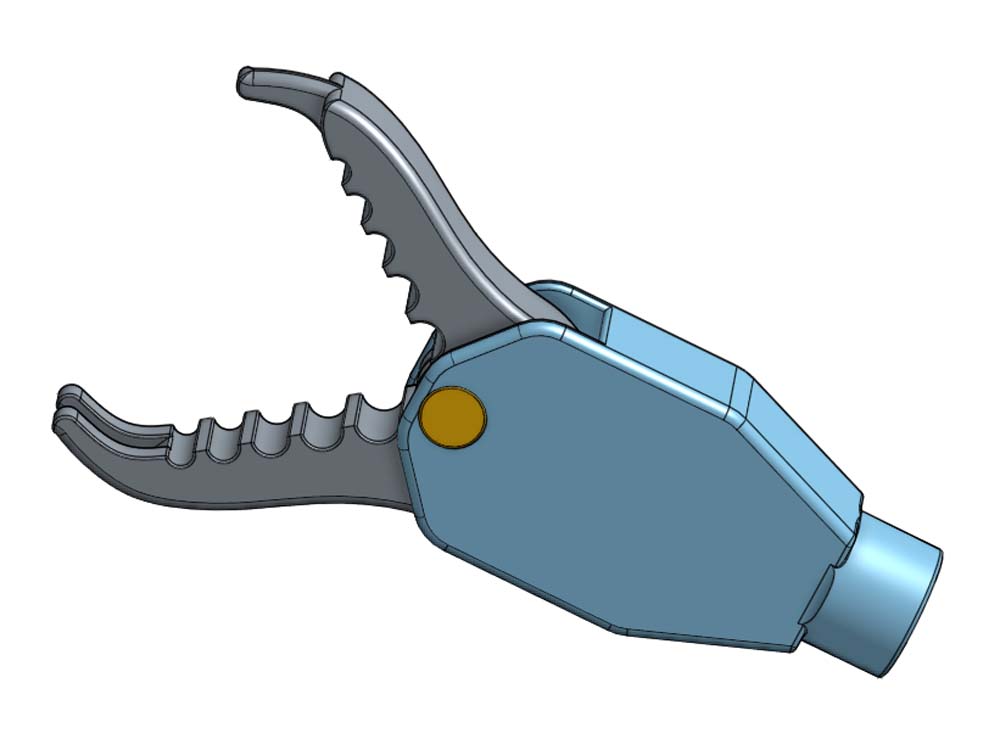
This is what the parts will look like when assembled.
- Manipulator003.jpg (64.03 KiB) Viewed 36133 times
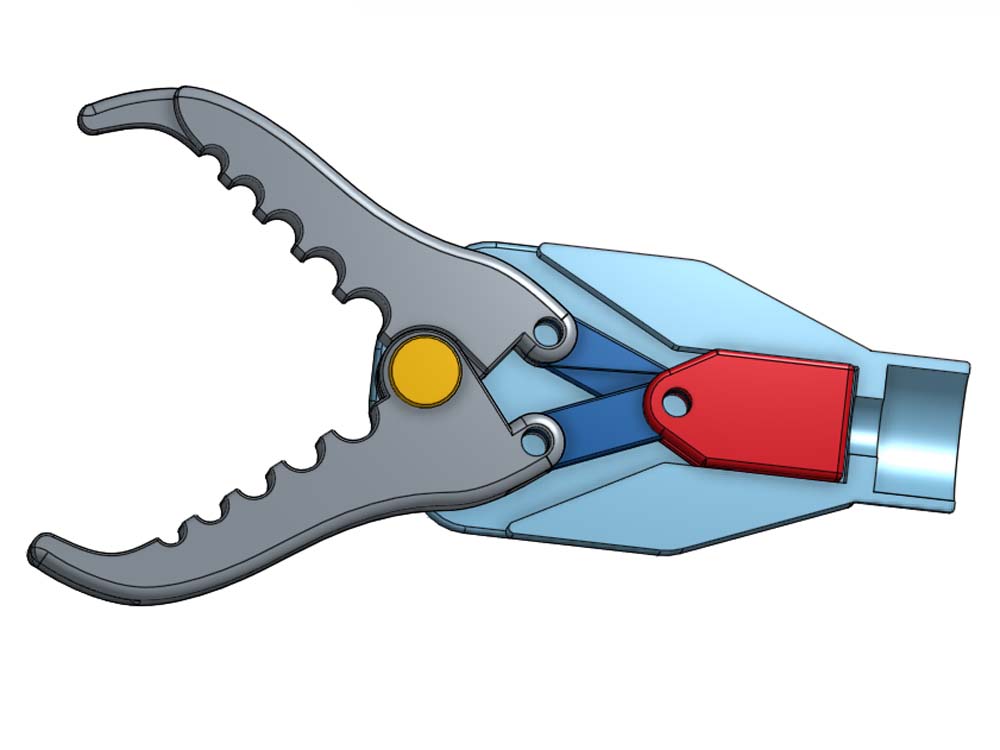
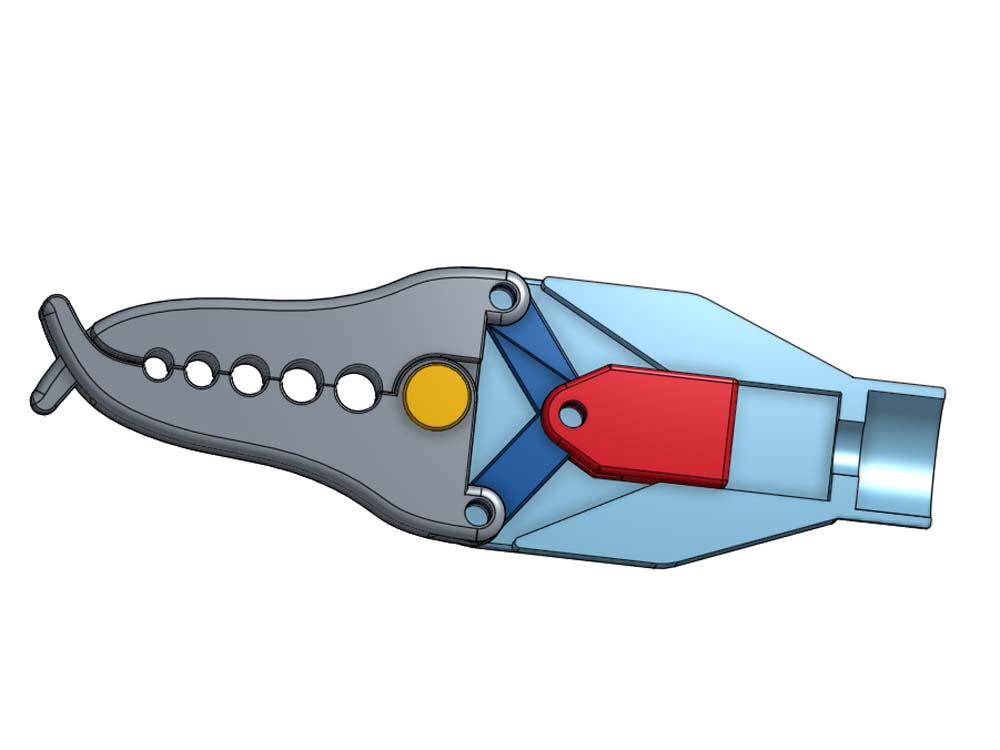
Here are a few cut away views to show how it works.
- Manipulator004.jpg (58.54 KiB) Viewed 36133 times
It will work of the same thread rod principle I have also used in the post. The actuator rod (not shown) will thread into the red slide block.

- Manipulator005.jpg (380.11 KiB) Viewed 36133 times
I've already printed out some of the parts at this point.

- Manipulator006.jpg (224.45 KiB) Viewed 36133 times
The basic mechanics seem like they are going to work I just need to print the main body of the hand. This will probably take a good 4-5 hours so I just need to find the time to do this now.
-Steve




