Where to start...(sorry, it's a long introduction...I somehow managed to build an ROV before discovering this place!)
I've had an interest in photography and experimenting with gadgetry from a very young age. I've spent the last 10 (almost 10 anyway) years at Bournemouth University, 4 as a student, 5.5 as a member of staff in the "Applied Science" school, doing various things including being a research assistant, an administrator, as well as a demonstrator and lab technician.
My degree at University was Environment & Coastal Management, and in all my roles I've always enjoyed bringing my photographic interests to play.
One project that I was involved in, (started off as a personal project, and then ended up getting used!) - was baited cameras to deploy on our local "surf reef". The cameras we decided to use were GoPro Heros.
When we received a Hero 3, it got me thinking, whether the wireless capabilities could be used to get a live feed to the surface. I knew wifi didn't work through water very well, but looked in to it anyway. My searches brought me across two things. First, a youtube user had posted an ROV that used a Hero2, with a router placed near it on an ROV, to get a signal to the surface. I then found Doug Levins "ROV in a Bucket" guide, and slowly but surely, over a few months, I came to the conclusion that I too would give it a go!
I was made redundant at the end of July, and so a few weeks ago, I began building my ROV. I didn't really have much of a plan, no designs so to speak. When I built the frame, I literally just cut a few lengths of tube and decided upon the size that way, and what looked "right". My experience of electronics of this kind were pretty much non-existent, I've learned so much, and already have plans for other designs, if I can scrape together the funds!
Below are some photos of the build...
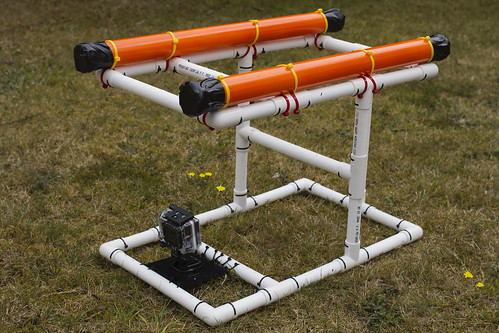
Initial frame design. I've used part of the packaging from the GoPro as the attachment bracket for the camera. I learned early on that for future projects, PVC piping, though a little more expensive, would be better than Polypropylene, as you can't glue/solvent weld PP! Everything is held together using cable ties. At least I can make the excuse I can easily modify the frame design in the field!

Frame 2 by Chris_Moody, on Flickr
Camera attached, also added two pontoons/floats to the top.
Frame 3 by Chris_Moody, on Flickr
Here I've put the tether together, and attached the 3 bilge pump motors. You can also see the start to the networking. The tether is 4x 25m lengths of 16 gauge speaker cable, and a 30m Cat6 Ethernet cable.

Progress by Chris_Moody, on Flickr

Tether by Chris_Moody, on Flickr
Here's the control box. The left and right switches are moment DPDT switches, so they return to neutral when pressure is removed. The Vertical switch stays on in either direction if needed. Inside the box is the surface router, which a smartphone or tablet computer can connect to to see the camera feed.

Controller by Chris_Moody, on Flickr
Powered by a car jumper battery. Just to be safe I wired in a fuse.

power by Chris_Moody, on Flickr
And a close up of the gubbins. It's since been tidied a bit. The resin block behind the camera contains a small wireless repeater. All the electronic connections have been encased in resin.

Props by Chris_Moody, on Flickr
Yesterday it went out for its maiden voyage at a local quayside. The visibility was quite poor, but at least it got wet. Up until this point I didn't know whether the frame would float/balance/sink, electronics leak, wifi signal work etc. I had a list of things in my head that could well go wrong. However, it seems the balance is pretty good, I could do with a little more weight, but the vertical thruster is more than able to "dive". The side thrusters have ample power to move around fairly quickly too! Wifi signal wasn't 100% solid, but was good enough.
Below is a video from the very first ever test run, of my very first ever ROV build!
https://www.youtube.com/watch?v=cJqVNGCor3M
So what next? I'm contemplating some kind of arm on the front. If I could do it all again, I'd like to add more thrusters, a pair on the sides that would allow for sideways movement, rather than turning. I imagine this would be quite useful in combination with a robotic arm! Though the GoPro works well in this context, I'm wondering whether a cabled camera might work better. There is a slight (1 second) delay between the feed and real life, which makes piloting a bit hard.
I'm off to a marina tomorrow where there will be a bit more depth and hopefully clearer water.
Hopefully this hasn't been too long or boring for you to read. I apologise if it was!