So far, this is what it look like. Anyways, any questions, comments... are welcome!
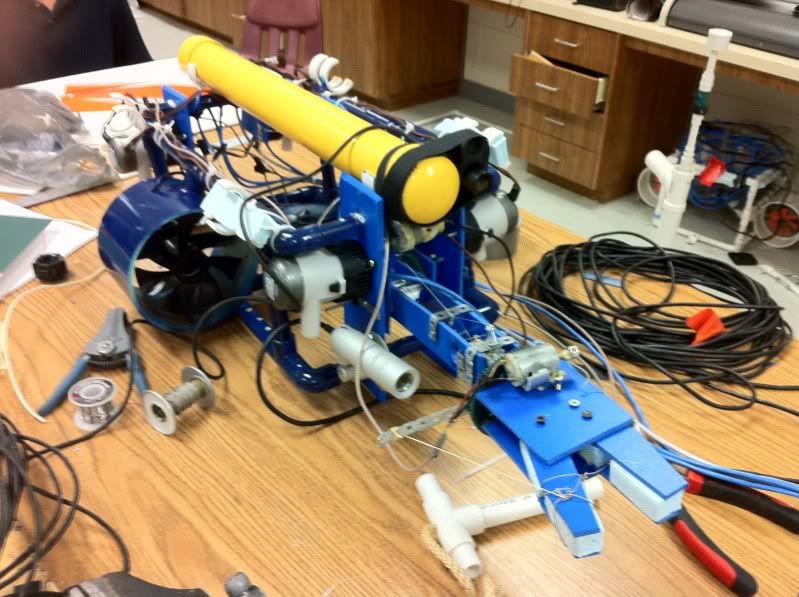
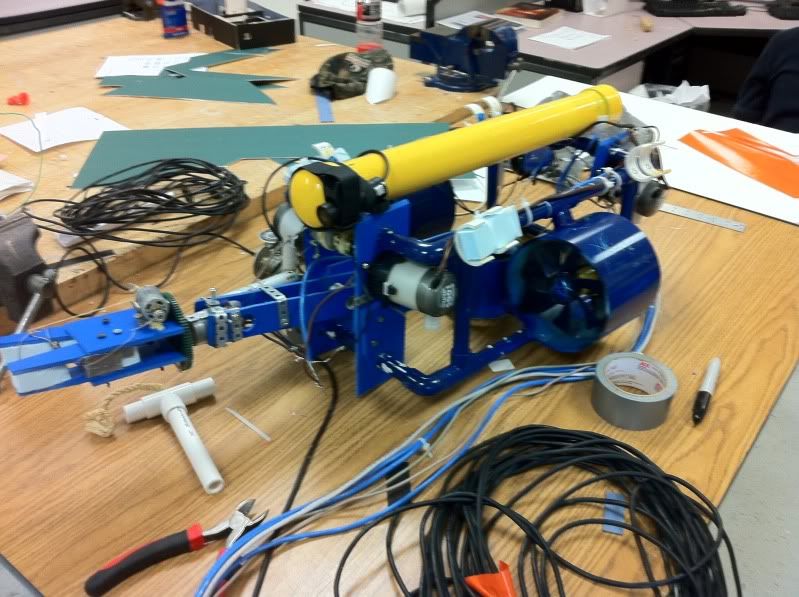
There are two cameras attached to allow us to control the ROV from monitors inside a room.

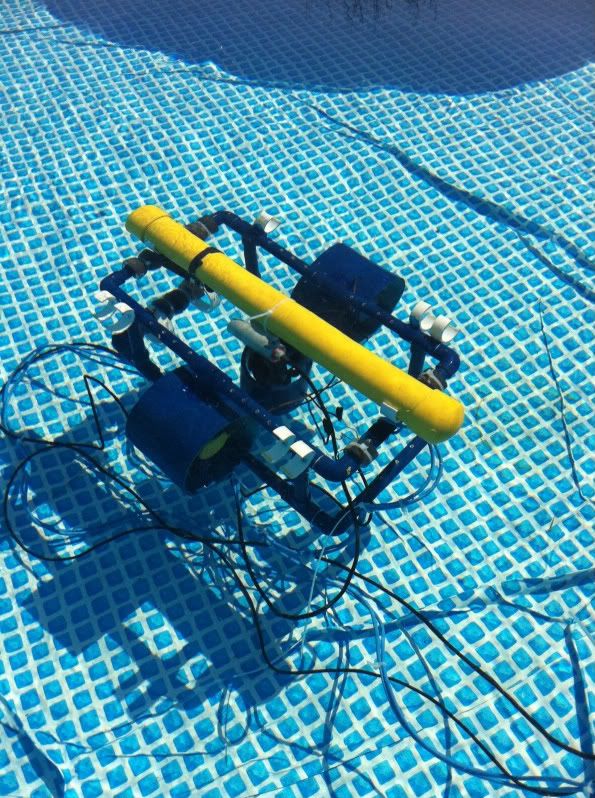
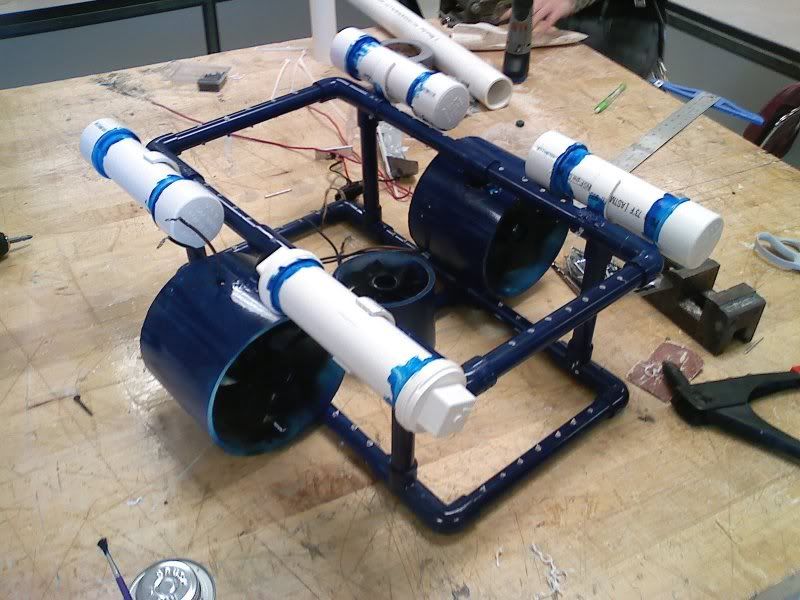
Propulsion supplied by modified bilge pumps with 140mm PC cooling fans attached. We have managed to get a little more than half of pound of thrust on each of the foward/reverse thrust motors. The center motor has a 80mm fan and can produce about a third of a pound of thrust up and down. The thrust is sufficient for the ROV since it is a pretty lightweight design.