Hi All,
Finally got the Electronics Tray all cabled up, the buoyancy fairings, and the ballast weights installed on the Frame and a vacuum test of the two WTCs.So I was ready to put the ROV in my 38 gallon test tank. The biggest problem I had prior to being ready to test was getting the Power Cable from the Electronics Tray WTC to the Thruster Power Distribution Board to be watertight. It took about two weeks of experimenting and testing to achieve a waterproof seal.
I charged up the two 3S 5000 mah LiPos that I am running in parallel and stuffed them into the Battery WTC and let the ROV run for a while to heat up the air in the Electronics Tray WTC prior to sealing the vent plug. I then put the ROV into the test tank and added water. When the test tank was 2/3 full the ROV began to float and according to the QGC HUD, the Frame is stable in both pitch and roll.
I then tested the functionality of the Thrusters, Camera Servo, and the Lumen Lights. All of the components worked as expected. It is kind of wild to watch the ROV Frame move sideways (strafing) as I have only been used to three thruster ROV Frames. Even with only the BlueESC T100 Thrusters at 50% drive, the ROV seems pretty powerful.
Pictures below show the finished ROV Frame:

Front View showing RPi Camera and Lumens

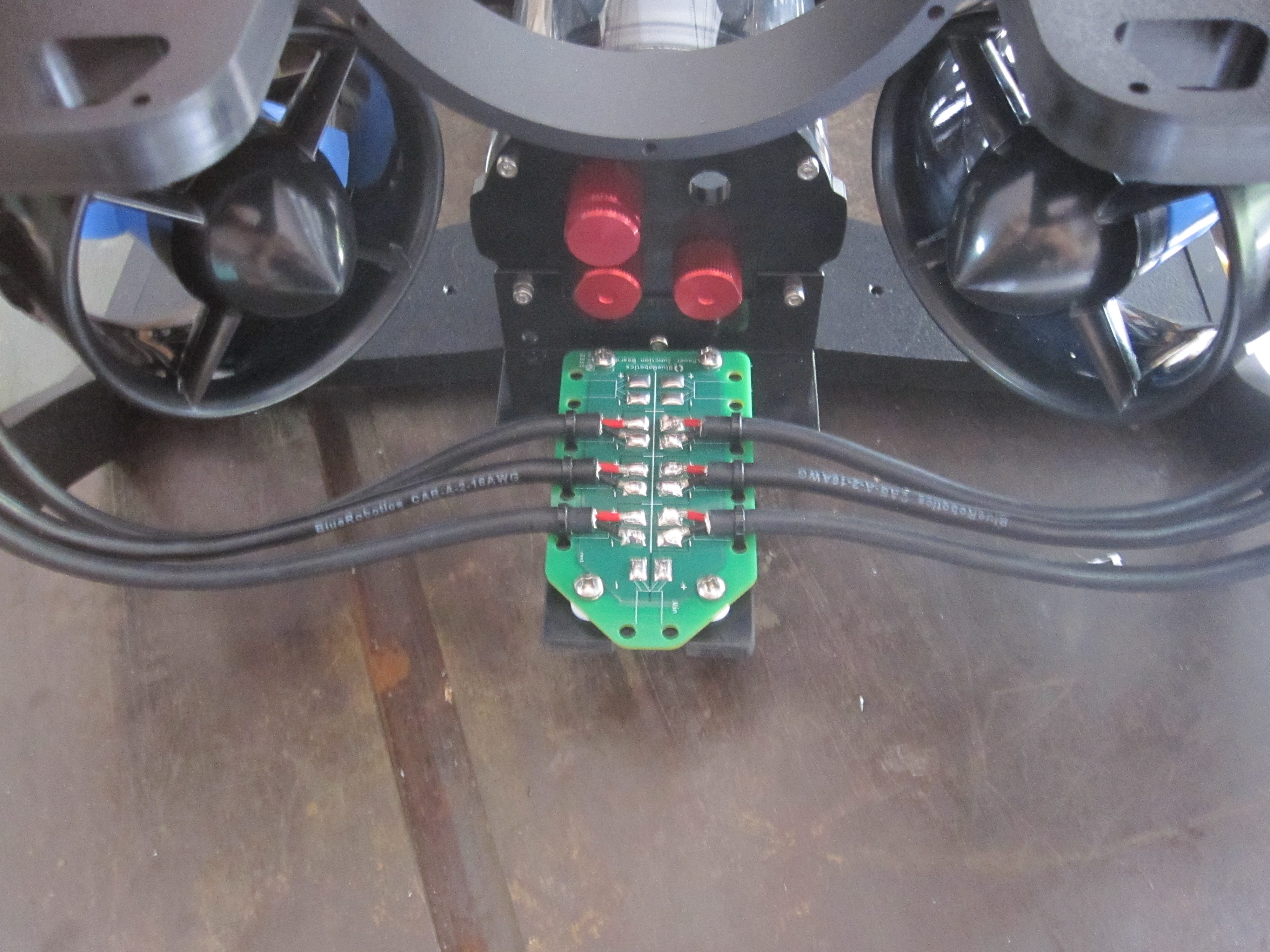
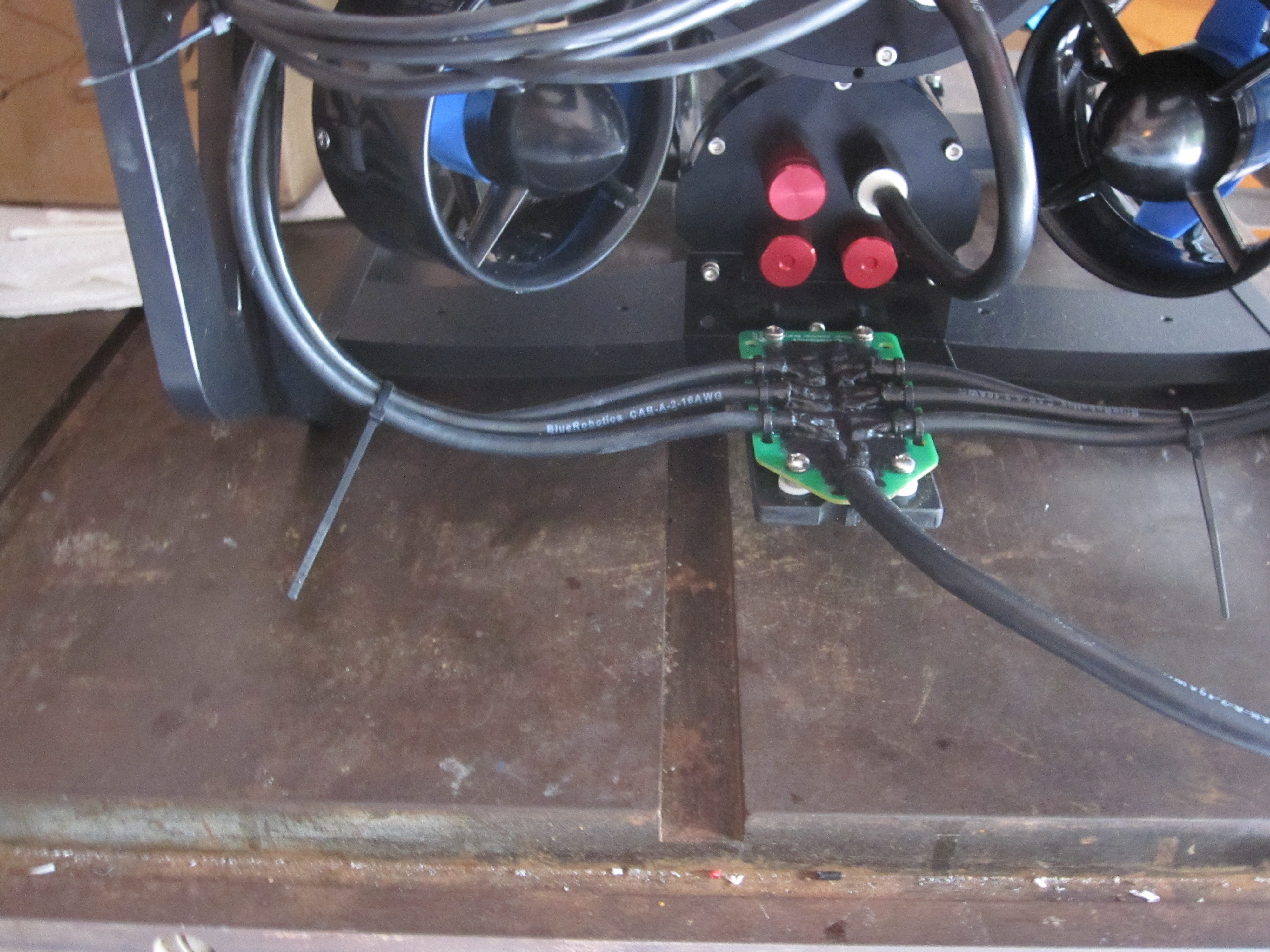
Rear View showing BlueESC Thruster Power Distribution Board and temporary Tether

Side View
I believe that this project proves that the BlueESC Thrusters can be used in a BlueROV2 Frame, but it is not the easiest project I have tackled especially getting the Power Distribution Board Power Cable watertight.
I will grab a shot of the ROV in the test tank to show how well balanced the Frame is due to Rusty's (BR) excellent ballasting scheme.
More to come
Regards,
SSN626B/TCIII