Page 1 of 1
ArduROV 3
Posted: Jul 18th, 2017, 10:52 am
by ArduROV
After a long period of practicing other hobbys, working and a lot of family time I was able to finish my third homebuild ROV.
My new ROV has some new features:
- 6-thruster design for lateral movement
- very small and easy transportable in one case
- one axis gimbal for camera movement and compensation of pitching the ROV
- easy to handle electronics
- and a lot more...
some pictures:



In the next weeks I will try to post some Videos.
Re: ArduROV 3
Posted: Jul 18th, 2017, 8:55 pm
by Ian MacKenzie
Nice! Do you have any build pictures?
Re: ArduROV 3
Posted: Jul 19th, 2017, 8:34 am
by ArduROV
I have just a few pictures. I forgot to take more pictures during the build process.

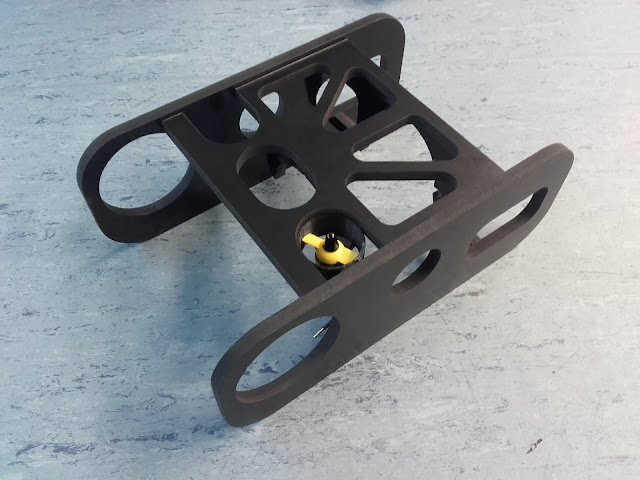
First my first 3D printed thruster.

The frame is made of polypropylene and a few stainless steel bolts
A lot of printed propellers before testing

The 3S3P LiIon battery before potting
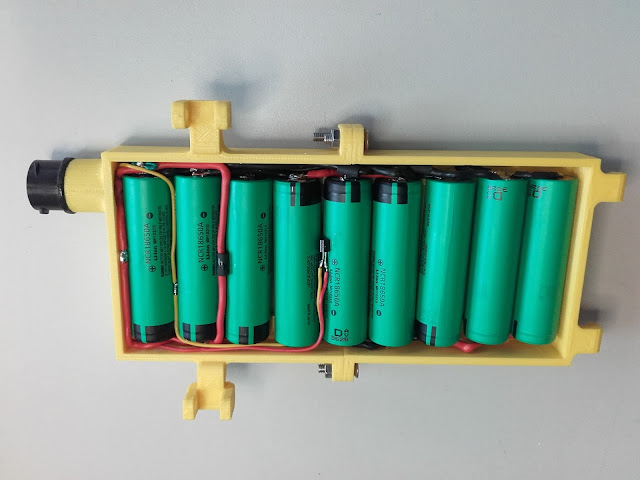
..and after.

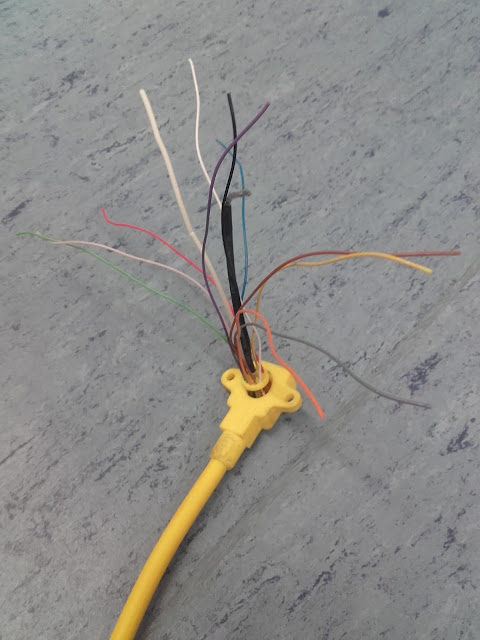
one of the hull penetating cables before potting
the WTC caps were made with my lathe

I will post a few more detailed pictures of the ROV to show you a little bit more.
PS: Today a awsome test in the baltic sea up to 12 m depth

Re: ArduROV 3
Posted: Jul 20th, 2017, 7:13 am
by bigbadbob
Looks very professional ArduRov.
Looking forward to hearing more about it.
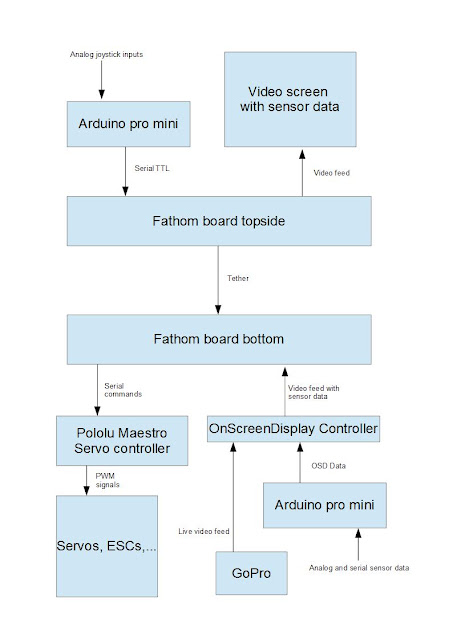
Do you use 2 arduino's? one topside and one sub side?
Also what comms protocol do you use?
Re: ArduROV 3
Posted: Jul 20th, 2017, 10:14 am
by ArduROV
Is this answering your question?
Re: ArduROV 3
Posted: Jul 20th, 2017, 6:01 pm
by bigbadbob
Yes, perfectly thanks.
I also use an on screen display (modified minimosd, basically a simplified arduino and osd chip on one tiny board.) to bring my sensor data up, it saves me a couple of tether cores. I get away with six cores total.
