I have now test the rov in seawater and i discovered a major problem with the rov.
Is like a whale or seal, front of rov is diver first,sow the rov running not straight ahead,otherwise it works great.
I have try to move Thrusters more down,but its the same.
I will try to move Thrusters more forwards to front if possible,
or try to mount them on the outside and see what happen
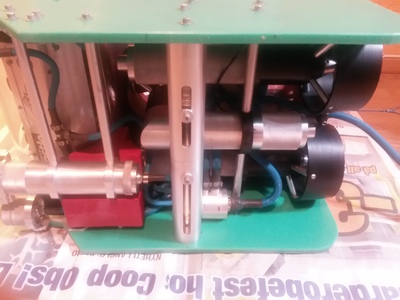
The frame i use now,is only a test frame,sow i need to make a new one,after i have found out where i can mount horizontal Thrusters.
I have try to move Thrusters more backward,but its the same,front of rov is diver first.
I have now move horizontal Thrusters more down and more forwards to front,but front of rov is diver first.

I think those Magnetic Coupled Thrusters is to powerful ,i need to slow down speed.I have 4 gear on all Thrusters(40,60,80,100% speed), if i use gear 3 or 4,then is like a rocket.
I think, i need to use the vertical Thrusters to help to get rov running straight ahead,when i drive rov forwards.
I will use the MPU-9150 to run the vertical Thrusters.
I will try that,and see what happen.