Hi,
Yes the 'atmosphere' is the same (fluid).
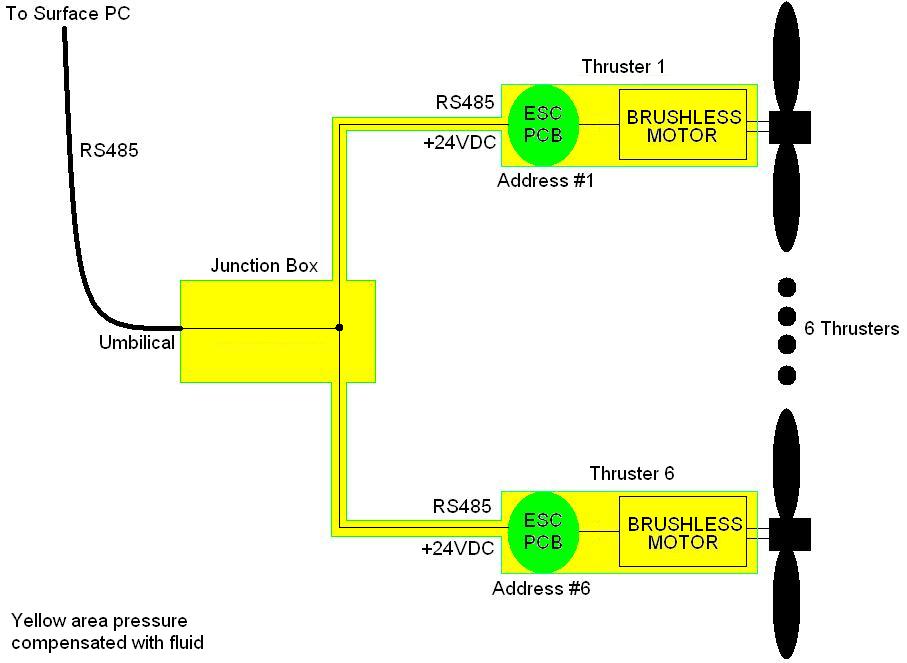
My intention is to take all the hoses from the thrusters back to a central point (junction box), connect then together, then take in my tether/umbilical from the surface to the same junction box, probably through a gland.
- ROV Propulsion.JPG (51.5 KiB) Viewed 7250 times
The intention is then to make the yellow (in the drawing

) fluid pressure equal the water pressure using a compensator (probably an oil filled balloon of sorts).
This means the differential pressure on the motor shaft seal, motor housing, hose and junction box remain the same (and low) no matter what the depth.
That's the plan as it stands today anyway

Martin
