|
HBRD3 - Rov On Board Control
|
|
|
 |
|
To control of the Rov via the laptop I chose this is Phidget 0/16/16 USB Interface Card. Control will still be digital (basic on or off) but this board will allow me to turn on and off 16 separate functions, it will also allow 16 inputs, these too are just basic on/off functions but I plan on using these for leak detection for the various housings.
|
|
|
 |
| The Phidgets Board has a USB interface which presented a challenge because the longest USB cable you can use with any USB device is only about 15' so I had to find a set of USB extenders that would work for this application. I found this pair of extenders on eBay they cost me around $30 (shipped) and are made by Cables Unlimited (USB-1370) and they claimed to work up to 150' over cat5 cable.
I had to test them out so the first thing I did was splice three 50' sections of cat5e cable I had together, and after the initial test their claim seems to be true. I tested every USB product I own, the number pad, a mouse, a joystick, and the Phidgets board, they all worked perfect. The only problem I had was with my web cam , the camera worked fine on a 25' section of cable but at 150' the laptop would recognize the camera but not display any video. I think it has to do with the web cam being so old though and not with the extenders, I need to find another web cam to test it out fully. The next thing I had to figure out was how many wires of the cat5 cable the extender actually needed. (I asked a few companies that sell similar models what they required and they all told me it uses all of the wires.) Not believing that I started to clip one wire at a time and see what happened. After a little trail and error I figured out it uses 5 of the 8 wires. (I was hoping for only 4) This means for my application I need 5 wires for control, 2 for video which only leaves 1 extra wire. That means I will probably have to run an on board battery for main Rov power (which I thought about doing anyway) The next test was to figure out the max range it would work at. I added the 25' section to the 150' cable and the board still worked fine. That was all the cable I had so I had to barrow a 200' box of cable from work, I spliced some ends on to that box and the board still worked. I was only shooting for a 200' tether so for me it works better than I though. Just for testing purposes I then added my 150' to that to see what happened. At 350' the board worked but only 1 function at a time, if I tried to turn 2 or more functions on at the same time the board would disconnect and my program would bomb out. I only tested the Phidget board at these ranges and I didn't try anything between the 200' and 350' range. The last thing I wanted to try was to see if more than one USB device could be extended. I plugged the number pad which has 2 extra USB ports on it into the extender but as soon as I tried to plug the board into the number pad my computer gave me a error saying I exceeded the power requirements of my USB ports so that was the end of that tests. UPDATE - After some further tests I found the extenders are in fact only reliable out to 150' so my tether will be shortened to that length. My original tests where done on my laptop with it plugged into the wall with a power pack. During the firsts test the board worked fine with the 200' length of cable but when I recently tested everything out with the laptop running off the battery (which it will be out in the field) the board had a tendency to lose connection if the keys where pressed to fast in succession or if to many functions where on at once. I guess it can't push as much power to the board off the battery. |
|
|
 |
| This is a New set of USB Extenders (UE-1) I found that work better than the last ones. These are made by Shenzhen Langheng Tech and work out to a little over 300'. (100 meters) They have better models also but these were all I could afford. I bought these because this was the only company I email that could actually tell me that their product would work on as few as 2 pairs of a cat5 cable. Although they did say to reach the full 100 meters all 4 pairs are needed.
I've only done a few preliminary test on these but I had them working to at least 100' (it might have been 200' I tested them awhile ago and forget) on just 2 pairs (4 wires) of the cat5 cable. My future plans are to use a commercial Rov tether that has a cat5 cable plus a few other twisted pairs so I will be able to hit the 300' mark if I wanted too. (not that I will be able to afford 300' of it) |
|
|
 |
| I've scraped the idea of using the Phidgets card on this new Rov, partly because it's working great on the Seafox but mainly I want full Analog Control of the Thrusters as well as Analog Sensors on this one.
After much research I bought the above Velleman VM140 USB Interface Card. It seemed like a good choice with a total of 33 input/outputs: including analogue / digital and + 1 PWM. It was expensive at $170 but I've been wanting to try one of these for along time now. After sucking it up and buying one it shows up and it's a lot bigger than the posted specs of PCB dimensions: 195 x 142 x 20mm (2.7" x 5.6" x 0.8") Apparently someone a Velleman got there conversions wrong because it was actually (7.7 " x 5.6" x 0.8") even though I don't have a plan for the housings yet I know don't want to use a 6" Dia. Housing so I sent this one back. They do make a VM110 that is smaller but it has less features. |
|
|
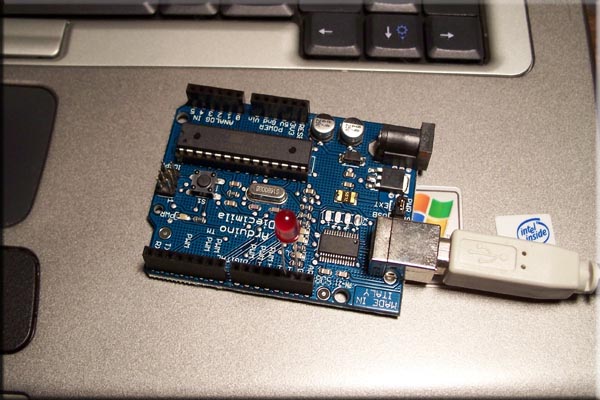 |
| I've decided to try the microcontroller route so I bought this Arduino Diecimila Board. It only has 14 digital input/output pins but 6 can be used as PWM outputs, it also has 6 analog inputs. I have to learn a whole new program language but its suppose to be easy. I've only played with it for about an hour but so far I can turn leds on and off via the computer so I'm at where I was with programing the Phidgets :) |
|
|
 |
| If I understand things right I should be able to run one or two of these Sabertooth 2X10 Regenerative Dual Channel Motor Controllers and control 4 thrusters via the Arduino. I haven't bought these yet as I still have a lot of learning to do first. |
|
|
 |
{kind=link}
| All Information, Pictures, and Material is copyright © 1998-2009 by Stephen Thone and may not be used for any personal or commercial purposes without the consent of the author. All rights reserved. The Author makes no guarantees or warranties as to the accuracy or completeness of, or results to be obtained from accessing and using the Information herein. | |||